Робототехника: история. Основные задачи робототехники.
 Фантасты 50-х представляли себе 2000 год с летающими машинами и роботами, живущими бок о бок с человеком.
Фантасты 50-х представляли себе 2000 год с летающими машинами и роботами, живущими бок о бок с человеком.
Как мы видим, этого пока не случилось, тем не менее сфера робототехники постепенно развивались в течение десятилетий, иногда стремительно затем ее развитие приутихло, но в настоящее время вновь возобносила небывалый рост. Каждый месяц производятся тысячи различных промышленных роботов, разрабатываются гуманоиды и андроиды, ученые всего мира работают созданием искусственного интеллекта, и все это -только начало.
Робототехника - это не самостоятельная отрасль, прежде всего это синергия всех последних достижений технических, естественных наук и информационных технологий.
Когда мы говорим "робот", то люди далеки от техники его примерно так и представляют как в советских фантастических фильмах с железными руками и ногами. Конечно, мы вкладываем в это понятие гораздо более широкий смысл.
Выделяют следующие группы роботов:
1. Промышленные - когда говорят "роботизация" имеют ввиду прежде всего развитие этой сферы.
2. Военные - единственный вид, который получил развитие в России, к ним же можно отнести роботов ливидаторов различных аварий и природных катаклизмов.
3. Космические - к ним относятся и спутники, планетоходы и антропоморфные роботы, помогающие космонавтам.
4. Бытовые - уборщики, кухонные роботы, роботы - компаньоны.
5. Андроиды, гуманоиды - различные антропоморфные роботы, чьей целью является усовершенствование "человекообразности" роботов для различных социальных целей.
История робототехники
Автоматизация и роботизация производства в капиталистическом мире началась в 50-е годы XX века. Именно к тому времени можно отнести появление первых промышленных роботов. Они осуществляли сборку оборудования, и простейшие монотонные операции.
Первый такой робот был разработан изобретателем самоучкой Джоржем Деволом в 1954 году. Робот-манипулятор весил две тонны и управлялся программой записанной на магнитном барабане. Система получила название Unimate на новое устройство был оформлен патент и а в 1961 изобретатель основал компанию Unimation.
Первый робот был установлен на заводе Дженерал Моторс (на литейном участке) в 1961 году. Затем новинка была опробована заводами Chrysler и Ford,
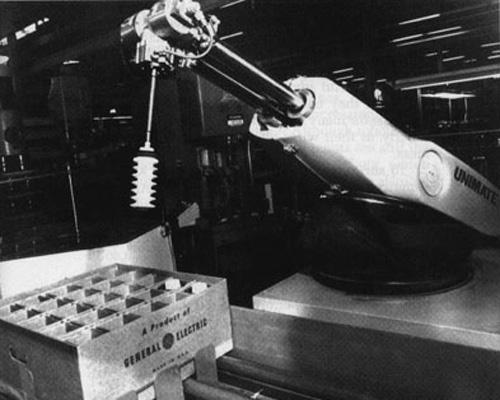 Система Unimate применялась для работы с литыми металлическими деталями, которые манипулятор извлекал из форм отливки. Захватиное устройство управлялось гидроприводом.
Система Unimate применялась для работы с литыми металлическими деталями, которые манипулятор извлекал из форм отливки. Захватиное устройство управлялось гидроприводом.
Робот имел 5 степеней свободы и захватное устройство с двумя "пальцами". Точность работы была весьма высока до 1,25 мм. И был эффективнее человека - работал и быстрее и с меньшим количеством брака.
В 1967 промышленные манипуляторы приходят Европу. Они уже расширяют свой функционал, осваивают профессии сварщика, маляра. У робота появляется "техническое зрение" посредством видеокамер и датчиков, он учится определять габариты изделий и место их расположения.
В 1982 году IBM разрабатывает официальный язык для программирования робототехнических систем. В 1984 - компания Adept представила первый робот Scara с электроприводом.
Новая конструкция сделала роботы более простыми и надежными, сохранив высокую скорость.
В 90-е появился контроллер с интуитивным интерфейсом управления, которому мог управлять оператор, он мог изменять параметры и регулировать режим работы. С тех пор возможности управления роботами и их функиции только развивались, увеличивалась их сложность, скорость, число осей, стали использоваться различные материалы , шире становились возможности разработки и управления, было сделано несколько первых уверенных шагов в сторону искусственного интеллекта.
 В то же время в СССР был фактически лидером в робототехнике. Началось все еще в 30-е годы. В 1936 году 16–летний советский школьник Вадим Мацкевич создал робота, который умел поднимать правую руку. Для этого он потратил 2 года работы в токарных мастерских новочеркасского Политеха. Ранее, в 12 лет создал маленький радиоуправляемый броневик, стрелявший фейерверками. На "робота" Мацкевича обратили внимание власти и в 1937 году он представлял его на Всемирной выставке 1937 года в Париже.
В то же время в СССР был фактически лидером в робототехнике. Началось все еще в 30-е годы. В 1936 году 16–летний советский школьник Вадим Мацкевич создал робота, который умел поднимать правую руку. Для этого он потратил 2 года работы в токарных мастерских новочеркасского Политеха. Ранее, в 12 лет создал маленький радиоуправляемый броневик, стрелявший фейерверками. На "робота" Мацкевича обратили внимание власти и в 1937 году он представлял его на Всемирной выставке 1937 года в Париже.
На рубеже 30 - 40-х гг. XX в. в СССР также появились автоматические линии для обработки деталей подшипников, а в конце 40-х гг. XX в. впервые в мировой практике было создано комплексное производство поршней для тракторных двигателей с автоматизацией всех процессов — от загрузки сырья до упаковки готовой продукции.
В 1966 в Воронеже был изобретен манипулятор для укладки металлических листов, в 1968 в Ленинграде году разработали подводный робот "Манта" с чувствительным захватным устройством - в дальнейшем он совершенствовался. В 1969 году в ЦНИТИ Миноборонпрома приступили к разработке промышленного робота «Универсал-50». В дальнейшем активно внедрялись автоматизированные системы на крупные производства.
В 1985 году уже использовалось 40 тыс промышленых роботов и в несколько раз превосходило количество, используемых в США. Автоматизированые линии вовсю работали на АвтоВазе в 80-е года и даже подвергались атакам работников-"хакеров".

Были крупные военные и космические разработки. Уникальным достижением по тем временам был беспилотный разведчик ДБР-1, который был принят на вооружение ВВС СССР еще в 1964 году. Такой аппарат мог выполнять разведывательные задачи над всей территорией Западной и Центральной Европы.
Одним из самых заметных достижений отечественной робототехники и науки стало создание в КБ им. Лавочкина «Лунохода-1». Именно советский аппарат стал первым в мире планетоходом, который успешно выполнил свою миссию на поверхности другого небесного тела.
В 1983 году на вооружение ВМФ СССР был принят уникальный противокорабельный комплекс П-700 «Гранит». Его особенностью стало то, что при залповом пуске ракеты могли самостоятельно выстраиваться в боевой порядок и во время полета обмениваться между собой информацией, самостоятельно распределяя цели. При этом одна из ракет комплекса могла играть роль лидера, занимая более высокий эшелон атаки.
Развивались и "роботы-гуманоиды": в 1962 году появился первый робот экскурсовод Рэкс - он проводил экскурсии для детей в Политехническом музее. Говорят, он все еще там "работает".
В Советском Союзе было выпущено более 100 тыс. единиц промышленной робототехники. Они заменили более одного миллиона рабочих, но в 90-е годы эти роботы исчезли.
В дальнейшем развитие робототехники идет ударными темпами, потому что развивается ключевые отрасли - физика, химия, электротехника и главное - электроника. На смену вакуумным лампам пришла силовая электроника, позже микросхемы, затем микроконтроллеры... Появляются новые материалы, новые способы автоматизации и методы программирования.
Но к России и СНГ это не уже не относится. Прежде всего развитие происходит в США, в Юго-Восточной Азии и Западной Европе.
На производствах внедряются управляемые роботизированные линии, роботы манипуляторы используются во всех отраслях промышленности, в сельском хозяйстве, медицине, в космосе и, конечно, в быту.
В некоторых отраслях до 50% работ выполняют промышленные роботы, например в автомобилестроении они могут сварить, покрасить, и переместить детали на другой участок сборки, где ими займутся другие роботы.
Существуют даже 100% автоматизированные фабрики. В Японии есть завод где роботы сами собирают роботов. И даже готовят еду для 2000 человек - офисного центра, обслуживающего этот завод.

В 90-е годы наблюдался некоторый спад. Внедрение роботов, использующих существующие в то время технологии, на производство не принесло ожидаемой прибыли и финансирование некоторых крупномасштабных проектов было приостановлено. По ряду причин - и экономических, и социальных - ожидаемого бума не произошло, они остались как нишевая продукция для автосборочных и ряда других производств.
Резкий скачок произошел только в середине нулевых и это развитие продолжается. Прежде всего из-за того, что в робототехнике заинтересовались военные...
Остановить уже развитие невозможно и все странам, желающим быть в авангарде мировой промышленности приходится это принимать и догонять.
Устройство робота и задачи робототехники
Выделяют шесть общих задач роботехники:
- Перемещение - передвижение в любой среде
- Ориентация - осознавать свое местоположение
- Манипуляция - свободно манипулировать предметами окружающей среды
- Взаимодействие - контактировать с себеподобными
- Коммуникация - свободно общаться с человеком
- Искусственный интеллект - робот должен самостоятельно решать как ему выполнить команду человека
Самое оптимальное перемещение робота на колесах и гусеничной платформе. Именно эти способы обеспечивают наибольшую устойчивость и проходимость.
У колесных платформ с проходимостью сложнее - колесо не может преодолеть препятствие выше, чем его радиус. Колесные схемы постоянно совершенствуются, используются мощные серводвигатели, разрабатывается независимые подвески, применяются покрышки с грунтозацепами.
Устойчивы четырехноние и инсектоморфные роботы (это значит в форме насекомых, несколько "ног", обычно 6) Такие устройства часто используются для военных целей.
Ходить на двух ногах робот учился очень долго. Из всех существующих с этим хорошо справляется только гуманоид ASIMO от Honda он умеет не только устойчиво ходить, но и подниматься по ступеням, компания его разрабатывала более 25 лет
Большинство же человекоподобных роботов пока передвигаются на платформе.
Кроме хождения по земле опреденные модели могут ползать, плавать и летать.
Ориентрируется в пространстве робот с помощью датчиков, сенсоров, видеокамер, имеет способность "видеть" в инфракрасном диапазоне, улаваливать ультразвуковые колебания и воспринимать тепловое излучение.
Управлять может и оператор, он может находиться в той же комнате или за несколько километров.
Все озвученные задачи робототехники в той или иной мере решаются. Робот становится совершеннее, он умеет сотрудничать с другими роботами, учится общаться человеком и лучше его понимать.
Интересная схема обучения космического робота-спутника, вероятно этот же принцип используется для настройки других робототехнических систем. "Эмоциональное обучение", как называют его разработчики. Суть его в том, что в нем закладывается "аппарат эмоций", который сообщает спутнику что для него "хорошо", а что "плохо". Хорошо - если он нацеливается на конкретный заданный обьект - это увеличивает оценку, плохо - если от него отклоняется - оценка будет уменьшена. Ну и так пока устройство не станет стабильным "хорошистом".
Например, это может пригодиться для космических телескопов. Обучение проводится с помощью оператора и занимает около 20 минут, результат отображается в базе знаний.
Конкретно это описанное устройство космонавт может выбросить в открытый космос: остальные действия спутник выполнит сам. В концепте разработана модель нервной системы, которая логически следует из тех условий, в которых работает нервная система всех живых организмов.
Робототехника будущего может самостоятельно собирать новые знания, анализировать их и применять на практике.
Просмотров: 58456 | Дата публикации: Понедельник, 20 июня 2016 06:56 |