Промышленные роботы: схематическое устройство
Общее устройство промышленных роботов
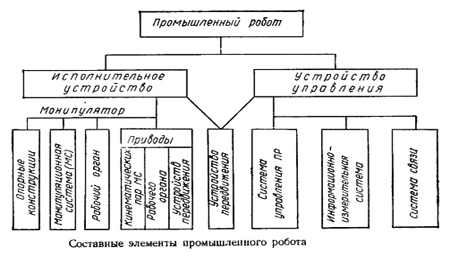
Общая схема любого робота:
Робот = механическая часть + приводы + устройства для восприятия внешнего мира + управляющее устройство
Механическая часть - может быть сколь угодно сложной, манипуляторы с десятками степеней свободы и подобные конструкции. Исполнительное устройство содержит один или несколько механических манипуляторов и устройство передвижения.
Манипуляционная система используется для переноса и рабочего органа или манипуляционного объекта в заданную точку. То есть для ориентации рабочего органа в простанстве, согласно установленной программы.
Обычный манитулятор состоит из опорных конструкций, манипуляционной системы, рабочих органов, приводов кинематических пар с поступательными или вращательными перемещениями манипуляционной системы приводов устройств передвижения и рабочих органов.
Может быть множество серво- и электроприводов, шаговых двигателей, приводящих конструкцию в движение. Опорные конструкции необходимы для размещения устройств и агрегатов конструкции робота (робот на независимых стояющих опорах называется портальным).
Для восприятия внешнего мира - всевозможные датчики, сенсорные устройства, видеокамеры, сканаторы, микрофоны и т.п.
Возможность управления запрограммитрована для следования определенному алгоритму или управление через оператора.
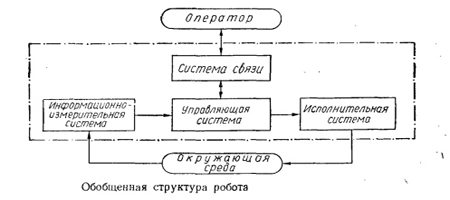
Система управления воспринимает информацию от датчиков и прочих устройств, перерабатывает ее и отдает команду исполнительной части. Контроллер управления роботом - это пульт, через который заносятся все параметры
Функция управляющего устройства - контроллера - состоит не только в формировании и передаче инструкции, но и в интерпритации тех данных, по которым можно судить о характере их воздействия.
Каждая точка четко прописана в рабочей программе, робот не отступает от нее не на шаг, роботу прописываются различные ситуации и то как он должен на них реагировать, это жесткий алгоритм, машина ничего не придумывает, а только исполняют заложенные в них команды.
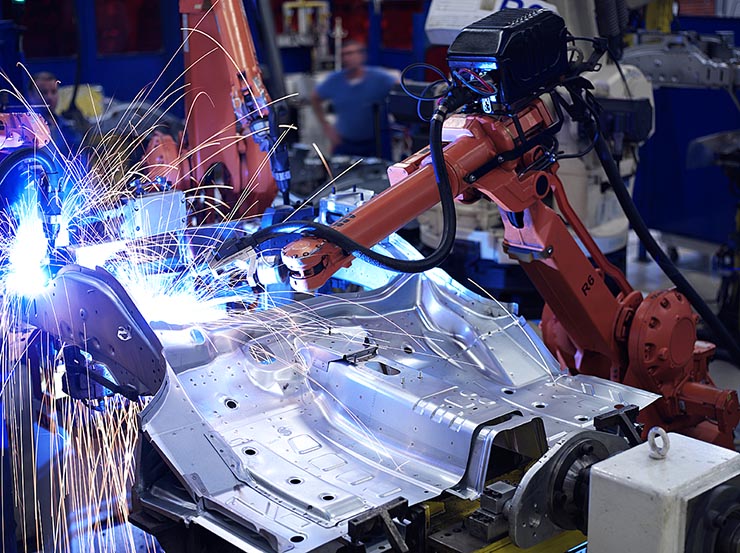
Схема робота, управляемого через оператора, дистанционно:
Промышленные роботы классифицируются:
- по областям применения: есть промышленные роботы, роботы для спецприменений и т.д.;
- по расположению в пространстве: это стационарные, с линейной осью, портальные;
- по принципам управления: роботы с программным или с дистанционным управлением.
- по характеру выполнения технологических операций;
- по степени специализации - специализированне, универсальные
- по числу степеней подвижности
а также по грузоподъемности, размеру, мобильности и т.п.
Выделяют:
- прямоугольную (линейная)
- цилиндрические
- сферическую системы координат движения робота
и различные их комбинации.
Японская ассоциация промышленных роботов подразделяет их по уровню сложности на шесть классов:
- ручные манипуляторы;
- устройства типа "взять-положить";
- программируемые манипуляторы;
- роботы, обучаемые вручную;
- роботы, управляемые на языке программирования;
- роботы, способные реагировать на окружающую среду.
В Европе и США термин не включает первые два пункта японской трактовки.
Просмотров: 2122 | Дата публикации: Понедельник, 20 июня 2016 07:42 |